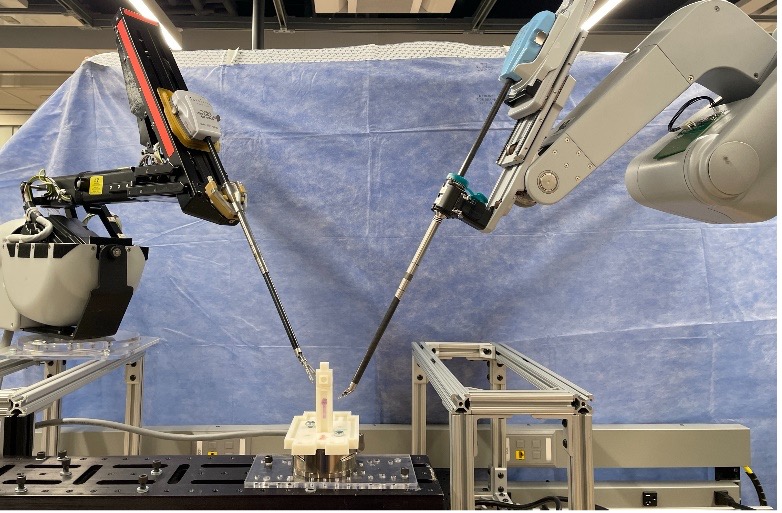
Most current surgical robots lack force feedback to the surgeon during surgery, which can lead to excessive force applied to tissue. We hypothesize that adding force feedback would create a more immersive surgical environment than is currently available. A typical procedure in which force feedback can play an important role is anastomosis. Anastomosis is a critical part of most reconstructive surgeries with dire consequences in the event of an anastomotic leak. Despite being a key risk factor for anastomotic leaks, currently, there is no objective method of measuring force intraoperatively. Unfortunately, estimating tissue interaction forces at the tips of robotically controlled surgical instruments has proven challenging. Sensor-based force feedback comes at a high cost as force sensors make instrument sterilization difficult and can limit the life of an instrument. We propose a sensorless method to estimate external forces on the da Vinci Research Kit. We will further apply these methods to build in-vivo force metrics for anastomosis and investigate the universality of these methods by deploying them on other surgical robots.