Research
Click on the image to see a description of the project!
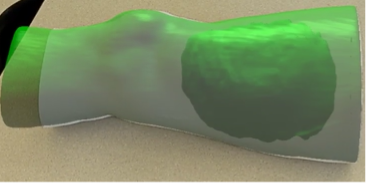
Radiation Visualization using Augmented Reality
Sensorless Force Estimation on da Vinci Research Kit
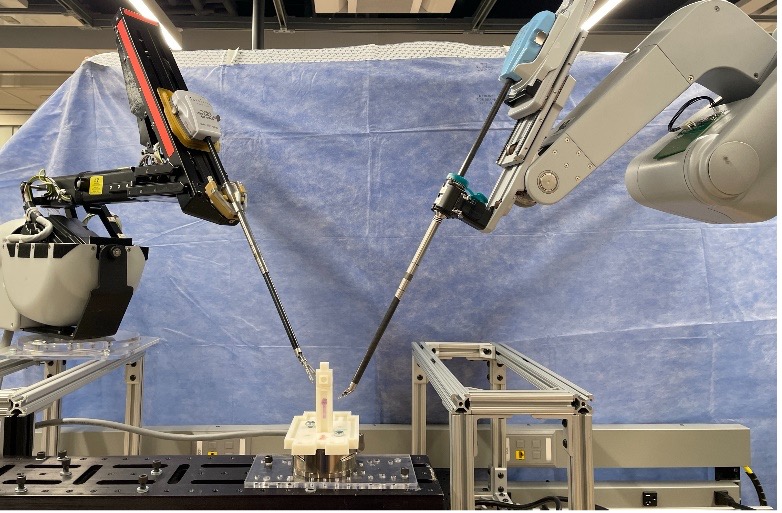
Robust Eye Tracking for da Vinci Surgical System

Surgical Training and Skill Assessment through Augmented Reality
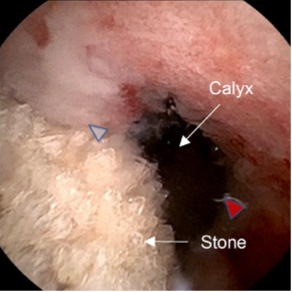
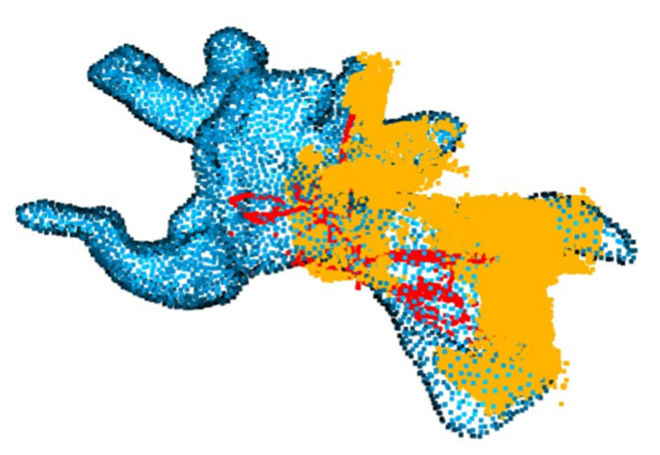
Vision based Navigation in Endoscopic Kidney Surgeries